Command Prompt
Microsoft Windows [Version 10.0.19045.5247]
(c) Microsoft Corporation. All rights reserved.
C++
HLSL
DirectX
lbgfx (Lobster Graphics Framework)
lbgfx is a from-scratch 3D Graphics Engine / Framework that I am currently developing in my free time.
lbgfx aims to use as few dependencies as possible while still being very capable. This framework utilizes a singleton-based design approach for modular development as well as improved end-user experience.
Visit the public GitHub to learn more about it!
WFPPacketInjector
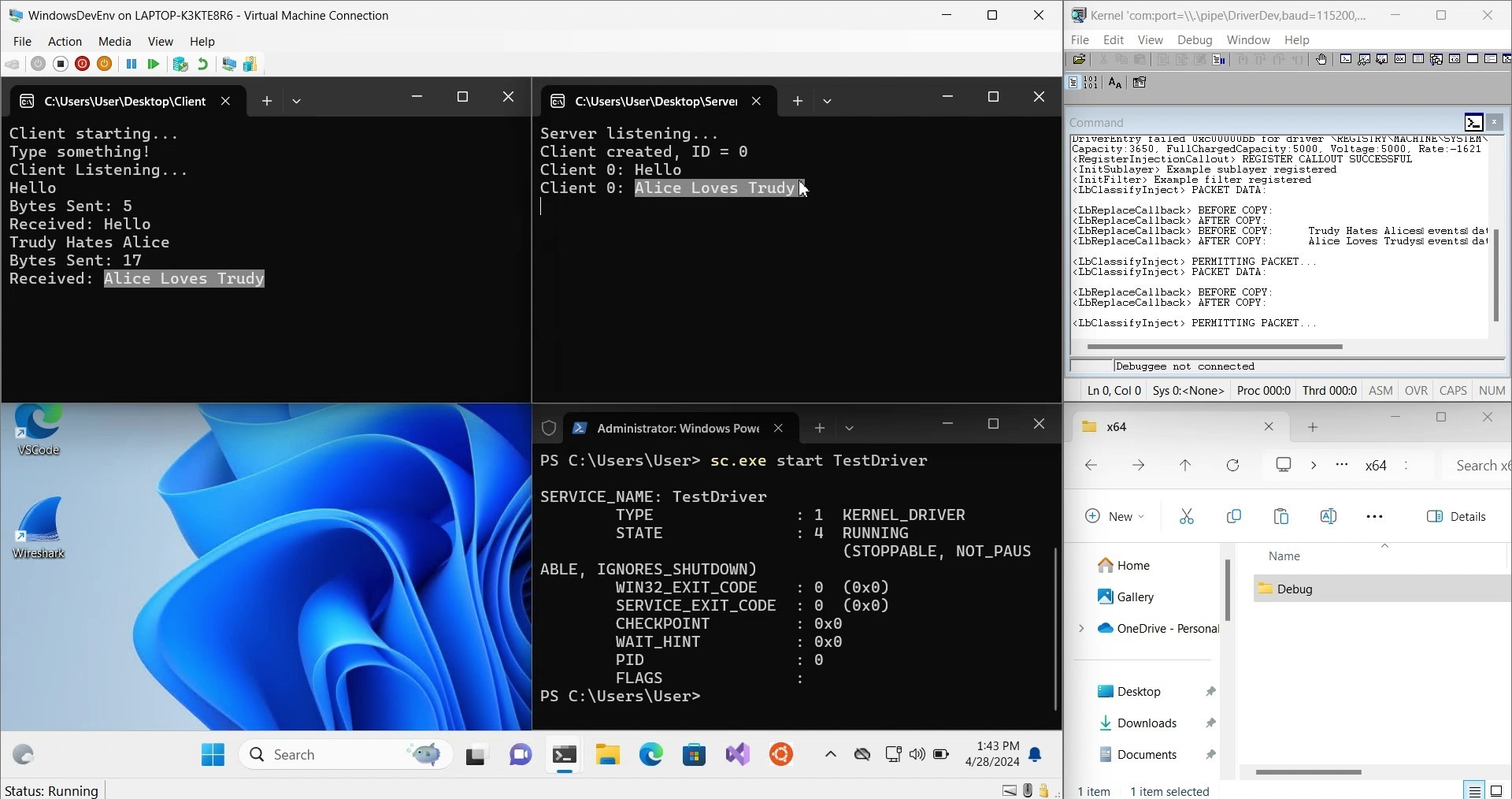
WFPPacketInjector is a Windows kernel driver that allows for simple packet capture and modification over a specified port.
The driver was developed as a simple demonstration of how a "Man In The Middle" attack may work from the attacker's perspective.
The Kernel Driver utilizes WFP (Windows Filtering Platform) to capture and manipulate packets sent on a specific socket before they get sent out. A video demonstration of this driver in action, along with a detailed explanation of the concepts it represents, can be found on the project's GitHub page.
Visit the linked GitHub to see more details and steps for recreation!
C++
Networking
Kernel
C++
Fonts
Parsing
SotfP (Simple OTF Parser)
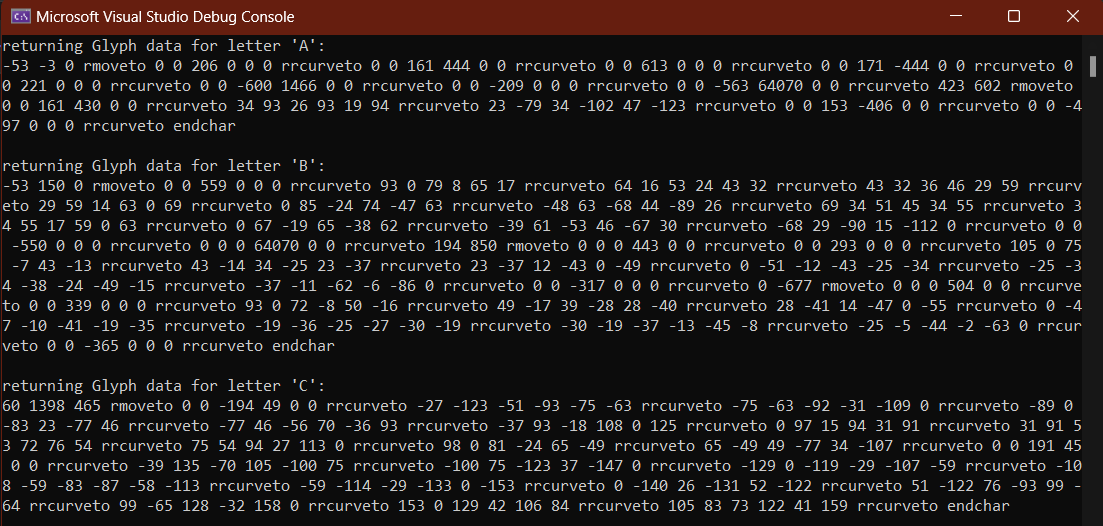
SotfP is a from-scratch OTF file parser
I designed and developed this parser for two main purposes. The first being the prerequisite to font rendering for my from-scratch graphics library. The second reason, to make it an excellent education tool.
While there is quite a lot of documentation on the OTF format, I found it quite difficult to decipher for basic implementation use. Additionally, I failed to find an existing basic OTF parser, so I decided to create one.
This is a very useful tool for me both in education and implementation; however, I largely designed this to be an easy-to-follow repository geared towards learning about the OTF file format.
Visit the linked GitHub to check on current features and development!
ABB-1200 Movement and Simulation
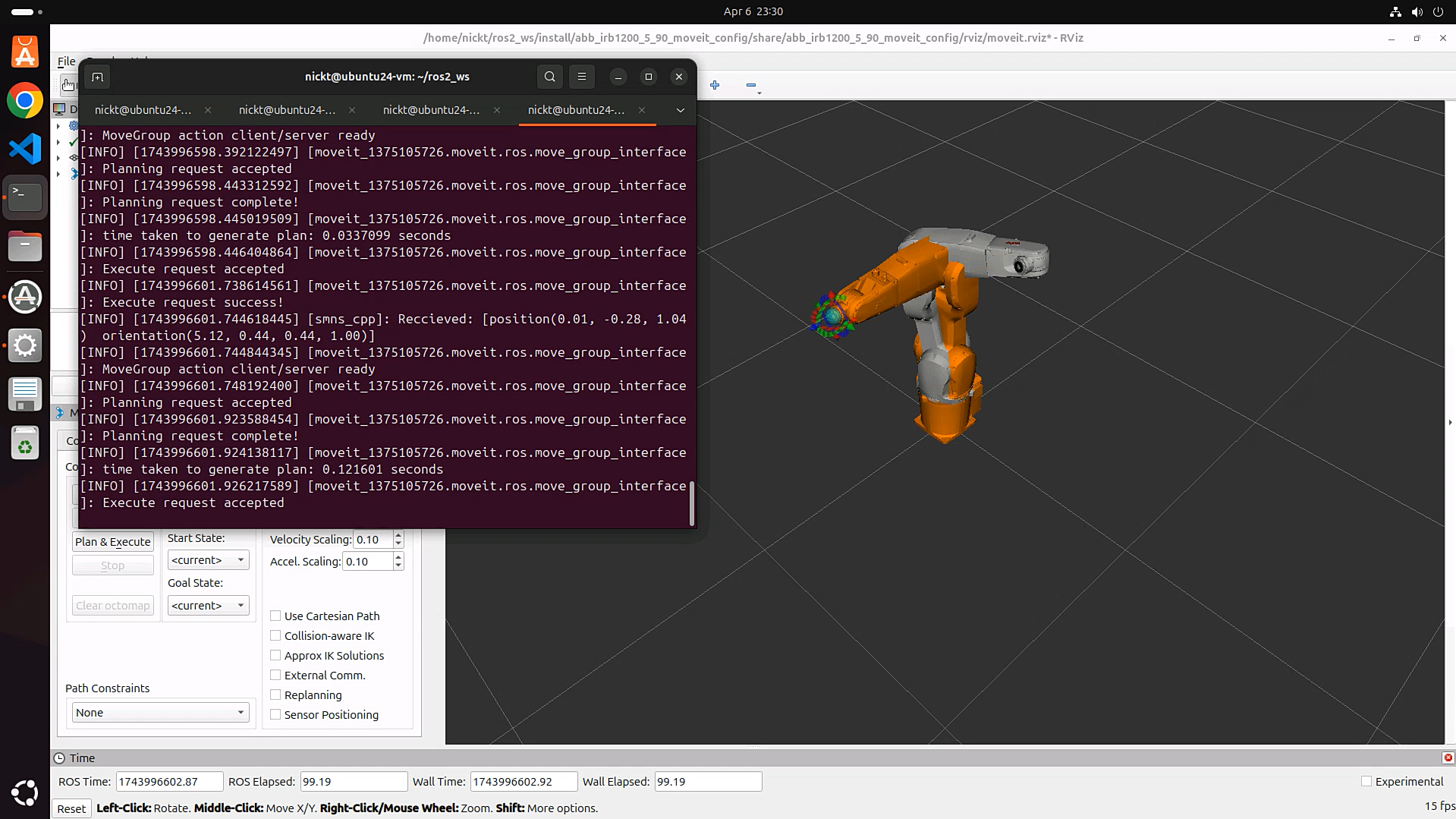
Worked with a team of 3 other developers on a course project for CCSU CS-498.
For this we had to research, test, and implement a method to move an ABB-1200 robot arm located in our University robotics lab. We were tasked to use modern libraries such as ROS2 and MoveIt2 to accomplish this goal. As a team, we created a simulated environment for the arm in RViz2. We developed several nodes (subscribers and publishers) in both Python and C++.
My main role in this team was programming the nodes for communicating with the Robot and transmitting data. I utilized both C++ and Python to build these nodes.
This project is to be completed by graduation (May 2025). After this project has concluded, I intend to tinker around with a personal implementation of this project to test compatibility with other robots and simulated environments. I plan to make these implementations public on my GitHub, however, this specific course project is not a publicly viewable repository.
ROS2
MoveIt2
Linux
C++
Python
Web
NextJS
.NET
MOTH Development Services
MOTH is a small company I started with 2 friends from CCSU.
MOTH develops software for small, medium, and large-sized businesses. As a team, we work together to develop software solutions to solve our clients' biggest problems.
This software can range anywhere from building and designing a website, inventory management systems with POS integration, cross-platform mobile applications, or any other custom solution our customer requires.
Check out our Business Website, linked in this section, to learn more or get in contact with us!